Radar is without doubt one of the biggest technological advances of the last century. It’s the technology that gave Britain a chance against the Luftwaffe in WW2 – ultimately preventing an invasion – and today it’s what allows safe take-offs and landings of 39 million annual airline flights. Now the same technology is being rapidly adopted in passenger vehicles and in 2020 the first motorcycles with factory-fitted radar systems will hit the market.
Ducati and KTM have both confirmed plans for radar-assisted bikes, but the technology they both use comes from Bosch – the same firm that supplies the vast majority of motorcycle stability control and ABS systems worldwide. As such it’s only going to be a matter of time before radar-assisted safety systems are as widespread as cornering ABS or traction control.
The whole project has developed under the control of Bosch’s President of Two Wheeler and Powersports, Geoff Liersch, an Australian engineer who’s overseen the project and covered more miles on radar-equipped prototypes than almost anyone else. We spoke to him to find out how these bike-mounted radars work, what the benefits are and what the future holds as these systems develop further.

Aussie Geoff Liersch is Bosch’s man at the forefront of radar development
How does radar work?
The term ‘radar’ actually started life as an acronym, standing for RAdio Direction And Ranging, and that gives a pretty clear indication of what it does.
The radar units themselves include a transmitter, which sends out radio waves, and a receiver that picks up the reflections of those waves when they bounce off objects. The reflections reveal where those objects are, how wide they are and the speed that they’re moving in relation to the radar.
“Radar systems on passenger cars have been in the market for some time and for motorcycles we will have a single radar on the front and another single radar on the rear,” explains Liersch. “These radars, from a technology point of view, are the same as we use on cars and they work by sending a radar beam out and measuring the response of objects that are reflected back into the radar itself.
“The radar has a range of about 160 metres but we don’t always use it all. On the front of the motorcycle we do use the full 160 metre range but on the rear it’s not necessary to use the full range because the delta speeds [the difference in speed between the radar and the object it’s tracking] are not as big, so maybe 60 or 70 metres is enough for the rear.”
While you can’t see or hear radar, it operates on much the same principle as sonar – which emits sounds and listens for echoes – but using radio waves instead of sound waves.
“It’s pretty much exactly the same except that the frequency that we’re sending out, instead of being in the audible spectrum, is right up at the 77ghz spectrum; so much, much higher”, says Liersch. “We send out a chirp in a particular direction and then we measure the response. We have directional measurement to tell which direction the response comes from, and that allows us to determine the direction and how wide objects are.
“The radar has a bunch of small antennas in there and depending on how you arrange the antennas you can get a different field of view. For a motorcycle application we’d have something in the range of 60 degrees, but if you know a little bit about antenna patterns, they always have lobes, where some directions cover a longer distance and some directions have a shorter distance, so we don’t get the full range in all degrees of view. That’s okay, because generally if a car is going to hit you they’re going to hit you from the front, not coming from 60 degrees at 160 metres away.”
While the radar will pick up reflections of any solid object in its field of view, it doesn’t get an actual image. Since the radar signal operates on a flat plane, the only measurements it gets are the objects widths and the speed that they’re moving.
“The radar sees all objects,” says Geoff Liersch, “It can see a lamppost at the side of the road, it can see a tree, it can see a car – both going away from you and coming towards you. It sees them just as objects with a certain width and with a certain delta speed relative to your vehicle. You have to remember that on a motorcycle we also have a speed input coming from the wheel speed sensors, so if I’m going along at 100km/h then all objects which are 100km/h delta in relation to my speed are basically stationary objects which are coming at me on the roadside. So we can choose to ignore those objects if they’re not in the direct path of the motorcycle because they will be road furniture or something like that.
“If there’s a vehicle that’s going away from you at 140km/h when you’re travelling at 100km/h, then it will come back showing that the vehicle is going 40km/h faster than you. And of course for vehicles coming at you then you’ll see a delta in the opposite direction; they’ll be coming at you at a certain speed, which is obviously your speed plus their speed. So if something is coming at you at 100km/h and you’re travelling at them at 100km/h then we’d end up with a 200km/h difference.
“That way we can determine if something is going away from us, coming towards us or stationary. The first and the second are the most important, the stationary ones are not so important because we assume that the road is there and a completely stationary object is not something that’s useful in regards to an adaptive cruise control system. Most of the radar cruise control systems only work above 30km/h so stationary objects are actually excluded.”


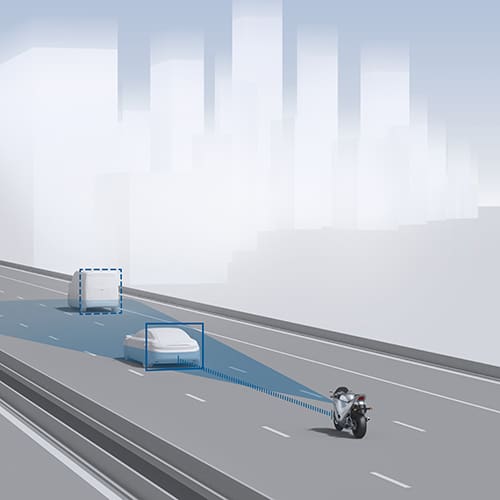
Bosch’s rear radar unit detectS and identifIES moving vehicles behind you, and determines the rate at which they are moving
Adaptive cruise control
The initial thrust of the integration of radar into motorcycles comes in the form of adaptive or automatic cruise control systems (ACC). These have been becoming increasingly common on cars for the last decade or so, and use radar to monitor the speed of vehicles ahead, automatically modulating the throttle to keep pace with them.
On bikes, the systems work the same way but the fact we lean around corner means there are some unique challenges to overcome. Surprisingly, the results have been better than even Bosch expected.
“One of the big differences between a passenger car and a motorcycle is the assumption for a car is that the four wheels stay on the road. But on a motorcycle we have lean angle, and that’s something that the car doesn’t have.
“If you imagine a radar beam, it’s relatively flat, like a big fan that’s flat in front of you, and as you turn into a left hand corner you’ll end up with the left-hand side of the beam digging into the ground, and you get reflections off the ground. We have the six-axis IMU that we use for stability control, so we know exactly what the lean angle is. Therefore we can exclude the ground because we know when the beam will be digging into it.
“A side effect we found on motorcycles is that not many people enjoy going into a lean and then accelerating if the vehicle is running by itself. Therefore we can actually cut out accelerations when the lean angle gets too large. That means if the vehicle in front ‘disappeared’ from the radar – for example on a hairpin bend where it might move out of the radar’s view – we don’t allow acceleration and, depending on the lean angle, we decelerate. Then, when we come out of the hairpin, the radar will pick up the car ahead again and accelerate back up to the rear of the vehicle. So the radar itself does actually lose vehicles, but the system as a whole means it’s difficult, as a rider, to notice that it has.
“The first system we will bring to the market is an adaptive cruise control. Today if you try to use a [non-adaptive] cruise control on a winding road it doesn’t work very well because it pushes you into the corners. With ACC you automatically keep a set distance behind vehicles and it has a curve speed control so as you go into corners it will decelerate, based on lean angle.”
The surprise came with the discovery that the ACC could be made to work well on twisting roads as well as in a straight line.
“This system was originally set up as something that we only expected people to use on freeways,” said Liersch, “But the first generation that we bring to the market can be used on a lot of winding roads as well. The performance is much better than we expected.
“Our first target was just to be able to use it on freeways or straight road conditions, but the engineers – being engineers – always wanted to improve the situation. So we’ve been slowly working on it to get it to a higher level of performance.”
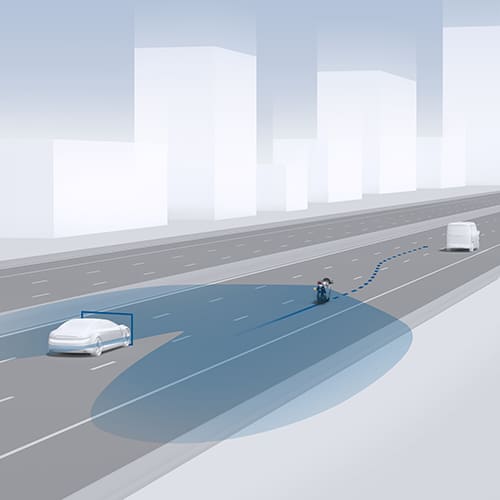
Blind Spot Warning (BSW) could mean that your bike can ‘see’ what you can’t
What’s it like?
While radar cruise control is something that most of us will have to wait until next year to try out for ourselves, Geoff Liersch already has years of experience riding with prototype versions of the system. So what’s it like?
“I’ve probably done about 3500km with the system so far, off and on, with different levels of configuration,” he explains. “To release our systems we have to do a certain number of kilometres on the road, so we have one or two riders to do that, but apart from them I think I’m the next longest-serving citizen sitting on the bike.”
Initially, as well as offering the cruise control function, the radar provides warnings if it thinks you’re likely to hit something. However, radar-assisted cars already feature automatic braking and it’s on Bosch’s to-do list for bikes as well.
“The first step is forward collision warnings – a system to tell you that you’re not looking where you should be. The natural progression that we’ve seen in passenger cars is automatic braking. Obviously for us the ability to do a full emergency brake is a target for the future, but the hard bit is that while car users are sitting down with a seat belt on, on a motorcycle you can’t always guarantee that the rider is sitting there with both hands on the bars.
“So the problem is not the braking side – from a technology point of view we can do that – but making sure that the vehicle is controllable in all circumstances with all riders. We will use data from the first generation to make sure that we understand all the scenarios that exist on the road and work towards things like emergency braking in the future.”
The form of the collision alerts will be down to the bike manufacturers that implement the Bosch radar system, but Liersch says that both audible and visual warnings are on the cards: “It really depends on the OEM in regard to how they want to give the information to the rider, but for example we have high-end instrumentation, TFT-type displays, so there’s no problem putting big visual warnings onto the displays. Also, with such high-end instrumentation, audio channels from the instruments through to headsets are technically possible to give audible warnings to riders if they have a headset on.”
Further ahead, the firm is looking towards systems that automatically decelerate or even brake by themselves, and of course Liersch has already tried those as well.
“If you give any disturbance to a bike that the rider doesn’t expect, a rider who’s got experience is pretty quick to tense his muscles and look forward to find out why. So even something as simple as rolling-off the throttle when you’re not expecting it and the bike is in automatic cruise control mode is enough to warn the rider.
“Two years ago I was riding with the system in Japan, going to the MotoGP. The MotoGP that year was extremely wet, so I rode out from Tokyo and the conditions on the road were pouring rain. Mist from all the cars made it very difficult to see even in front. I was trying to do a head-check to the lane beside to see if there was a car there and during that head-check a car in front that I couldn’t see decelerated. The system I was using was good enough to decelerate and to apply the brake slightly and that was more than enough to give me the hint that something was there, so I could brake before running into someone. So that’s the sort of thing the system can do, and in conditions like that I’m very sure that it will save some lives.”

This is a forward-facing radar unit on a KTM

A similar unit maintains ‘watch’ behind you
What about pouring rain?
As Liersch’s experience in Japan revealed, rain and spray isn’t a problem for radar systems. He told us: “They’re extremely good in conditions like that. If it’s raining or foggy, radar doesn’t really get impacted, so in those conditions the systems really shine. Of course they work in good weather too, but in bad conditions their usefulness is even higher than in normal conditions.”
What does the rear radar do?
While the front radar does the bulk of the work when it comes to adaptive cruise control, bikes fitted with the system also features a second radar pointing backwards. Initially, it provides an intelligent blind spot warning system, but in future the rear radar might become more important.
“It’s basically a blind-spot detection system for the first generation, but it’s a ‘time of flight’ blind spot detection system,” explains Liersch. “Bosch released an ultrasonic version of a blind-spot detection system on the BMW 650 scooters some years ago, which would simply warn you if there was a vehicle in your blind spot. But the radar system measures the speed of vehicles, so if a car is coming at speed and the time of flight is such that it will hit you in the next period of time, then it will give you a warning light in that case. So it can stop you doing something like pulling out in front of a car on an autobahn, or similar.
“The second function, for the future, is when we eventually get to things like full emergency braking and solve the problems mentioned earlier. We also must realise that our bikes tend to have better braking capability than some cars, so in that case we also need to monitor cars behind us to make sure that we don’t brake too hard and get hit from the rear. Stopping the bike from hitting a car in front doesn’t help much if the car behind takes us off our wheels!”
Active Cruise Control is already widely available in cars
Future developments
If we look at the driver assistance systems fitted to the latest generation of cars, it’s clear that after radar-assisted adaptive cruise control the next step that many are taking is a lane-assist system to help drivers steer the right course. It’s another step towards autonomous vehicles, but just because it’s appeared on cars doesn’t mean it will automatically follow on motorcycles.
Liersch said that cost, rather than technology, is likely to be the barrier.
“With radar we can’t see lanes; it’s just a painted line, so we’d need a camera-based system for lane assist. The technology is definitely doable and Bosch already has that technology on passenger cars, but there are a couple of challenges. Again there’s the lean angle – the image from the camera will rotate as the bike leans, which isn’t exactly ideal – but I’m confident we could solve the technology issues.
“The topic that’s more important at the moment is how much money are people prepared to pay for these systems? And that we haven’t got an answer for yet as we haven’t put them into the market. If we want to put out a system that’s got two cameras and two radars on a bike, it’s going to add extra cost. The camera systems are an enhancement, and we can do it from a technology point of view, but there’s a question as to whether there’s enough market to pay for the development of such a technology specific to motorcycles. At this stage, I’m not sure.”
On the subject of money, how much extra can we expect the new generation of radar-assisted motorcycles to cost? Liersch says much will depend on how many other safety systems the base models already have.
“The OEMs are the guys who end up setting the pricing,” he said. “And it will depend very much on the bike. We supply motorcycle stability control, the ABS and lean-angle dependent stuff, and a big chunk of our algorithms are running within that. So if the bike already has that, then the cost of the additional ABS unit is not necessary.
“The second part is the IMU. On the MSC [Motorcycle Stability Control] bikes that we currently have on the market, that sensor is also already there. And then of course there’s the cost of the radar, the mounting brackets and the fairings. I don’t know from a bike manufacturer point of view how much that total cost would be. But I don’t think it will be an unrealistic amount of money, especially for high-end motorcycles.”
We’ve already seen that other technologies like cornering ABS and IMU-assisted traction and stability control systems are spreading incredibly fast. Tech that first emerged on the most expensive models in manufacturers ranges is quickly filtering down to much more affordable machines, with Ducati setting a new bar by including cornering ABS on all models from 2019 onwards.
Does that mean radar will spread that fast as well? There’s a strong chance it will.

Advanced Rider Assistance technology will continue to be rolled out across various makes’ model ranges
Words Ben Purvis
Photography AMCN Archives & BP